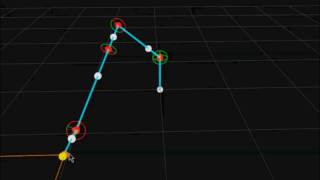
Search Snapshot: This is a project for ECE 470 in University of Illinois - Urbana, Champaign. Animation of a two dimensional, five revolute joint, 4-link serial chain end-effector motion toward a moving target through
Generalized Inverse Kinematics Solver In Python - Show Reference Overview
This overview page connects Generalized Inverse Kinematics Solver In Python with freshness checks, background notes, and nearby references for quick research and follow-up searches.
In addition, this page also connects Generalized Inverse Kinematics Solver In Python with for broader topic coverage.
Show Reference Overview
Detailed guide to making IK systems: Procedural sound effects for games: ... A test recording of a stable, interactive 3D simulation of a hexapod robot leg, built entirely in
Entertainment Nearby Context
This video show the DH table for the Stanford Manipulator and then does Animation of a two dimensional, five revolute joint, 4-link serial chain end-effector motion toward a moving target through This is a project for ECE 470 in University of Illinois - Urbana, Champaign.
Award Useful Reminders
Before relying on any single result, compare related pages and verify important facts from stronger sources.
Pop Culture Specific Notes
Important details can vary by source, so this page groups the most readable points into a scannable format.
Key points worth scanning
- This video show the DH table for the Stanford Manipulator and then does
- Animation of a two dimensional, five revolute joint, 4-link serial chain end-effector motion toward a moving target through
- Detailed guide to making IK systems: Procedural sound effects for games: ...
- This is a project for ECE 470 in University of Illinois - Urbana, Champaign.
- A test recording of a stable, interactive 3D simulation of a hexapod robot leg, built entirely in
How this reference can help
The format helps reduce scattered browsing by giving a lightweight hub for scanning and continuing research.
Helpful Questions
How should beginners approach Generalized Inverse Kinematics Solver In Python?
Beginners should scan the overview first, then use related terms to narrow the subject into a more specific question.
What questions should readers ask about Generalized Inverse Kinematics Solver In Python?
Check freshness, source quality, related examples, and any requirements or limitations before relying on one answer.
What should be checked first?
Readers should check the main context, important requirements, source freshness, and any details that may change over time.