At a Glance: Gerardo describes his work on the CLoPeMa FP7 European project which aimed to advance start-of-the-art in autonomous ... ICRA 2018 Spotlight Video Interactive Session Thu PM Pod J.1 Authors: Devin, Coline; Abbeel, Pieter; Darrell, Trevor; Levine, ...
Deep Object Centric Representations For Generalizable Robot Learning - Drama Complete Overview
This information hub highlights Deep Object Centric Representations For Generalizable Robot Learning with useful examples, follow-up ideas, and topic signals so the page feels less repetitive.
In addition, this page also connects Deep Object Centric Representations For Generalizable Robot Learning with for broader topic coverage.
Drama Complete Overview
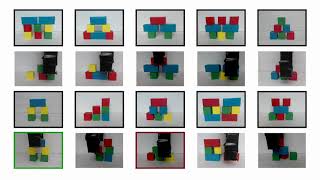
ICRA 2018 Spotlight Video Interactive Session Thu PM Pod J.1 Authors: Devin, Coline; Abbeel, Pieter; Darrell, Trevor; Levine, ... Gerardo describes his work on the CLoPeMa FP7 European project which aimed to advance start-of-the-art in autonomous ...
Why It Matters for Readers
The surrounding context helps explain why people search for Deep Object Centric Representations For Generalizable Robot Learning and what they usually want to check next.
Anime Reference Notes
This section highlights the practical pieces readers may want before opening a more specific related page.
Drama Smart Checks
Before relying on any single result, compare related pages and verify important facts from stronger sources.
Main details to review
- Gerardo describes his work on the CLoPeMa FP7 European project which aimed to advance start-of-the-art in autonomous ...
- ICRA 2018 Spotlight Video Interactive Session Thu PM Pod J.1 Authors: Devin, Coline; Abbeel, Pieter; Darrell, Trevor; Levine, ...
How readers can use this page
A structured page helps by giving readers comparison ideas for Deep Object Centric Representations For Generalizable Robot Learning while keeping the topic easy to scan.
Reader Questions
How can readers narrow down Deep Object Centric Representations For Generalizable Robot Learning?
Readers can narrow it by adding location, year, product name, provider, price range, purpose, or the exact problem they want to solve.
How does Deep Object Centric Representations For Generalizable Robot Learning connect to drama?
Deep Object Centric Representations For Generalizable Robot Learning can connect to drama when readers need context, examples, comparisons, or practical next steps inside the same topic area.
What is the quickest way to understand Deep Object Centric Representations For Generalizable Robot Learning?
Start with the main context, then compare related entries and check stronger sources when exact details matter.